Proyección sobre la nube de puntos
Mediante esta herramienta se puede proyectar un archivo vectorial sobre la nube de puntos, aportándole un valor de altitud que dependerá de esta proyección.
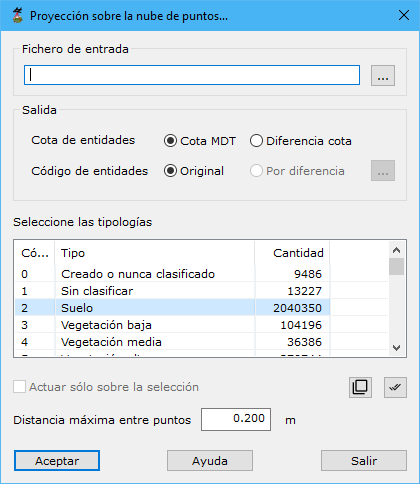
Los parámetros necesarios son los siguientes:
- Fichero de entrada: Se indicarán el nombre del fichero con las entidades que se desean proyectar. Se podrá utilizar el botón situado a la derecha para ejecutar el explorador de Windows para buscar el archivo. El formato de este fichero puede ser BIN de DIGI, DXF de AutoCad, DGN de MicroStation, Shape de ESRI o un fichero ASCII. Podrán estar almacenados varias entidades, excepto en el caso del fichero de formato ASCII en el que sólo se leerá una en forma de línea.
- Salida:
- Cota de entidades: Valor de la Z que se almacenará en cada vértice de cada entidad. Dos opciones:
- Cota MDT: Cota obtenida directamente de la nube de puntos
- Diferencia de cota: Diferencia entre el valor almacenado en el fichero y la proyección sobre la nube de puntos, útil para buscar errores de cota de las entidades
- Código de entidades: Código o capa en el que se almacenarán las entidades vectoriales. Dos opciones:
- Original: No se modifica el código en el que estaba almacenada la entidad originalmente.
- Por diferencia: Se podrá almacenar la entidad con un código diferente en función de la diferencia de cotas (segunda opción del parámetro anterior). La relación entre el código y la diferencia de cota se puede indicar pulsando el botón que está a la derecha.
- Cota de entidades: Valor de la Z que se almacenará en cada vértice de cada entidad. Dos opciones:
- Tipología LiDAR: Se deberán seleccionar las tipologías origen que se desean utilizar para calcular la proyección.
- Actuar sólo en la selección actual: Se podrá activar esta opción para calcular sólo en los puntos que actualmente se tengan seleccionados.
- Distancia máxima entre puntos: Distancia máxima para considerar dos puntos como adyacentes o vecinos en el terreno. Este parámetro dependerá de la densidad de puntos.