Filtrar puntos
Esta herramienta está destinada al filtrado de puntos láser, aligerando el fichero ya que se reducirá la densidad inicial.
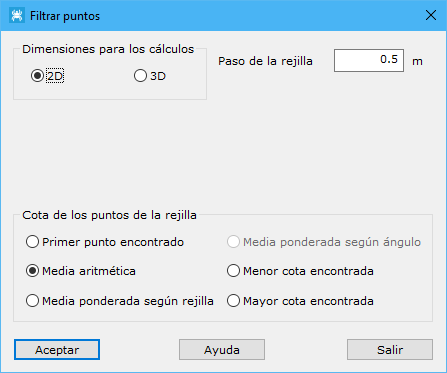
Los parámetros que precisa son los siguientes:
- Dimensiones para los cálculos: Se deberá especificar si los puntos láser son 2D (LIDAR) o 3D (láser terrestre).
- Paso de la rejilla: Se deberá especificar la distancia que tendrán los puntos filtrados.
- Cota de los puntos de la rejilla: Se deberá elegir entre una de las siguientes opciones.
- Primer punto encontrado: El programa utilizará la cota del primer punto encontrado en la zona cercana con la densidad fijada.
- Media aritmética: El programa utilizará la cota media de todos los puntos encontrados en la zona cercana con la densidad fijada.
- Media ponderada según rejilla: El programa utilizará la cota inversamente proporcional a la distancia de cada punto encontrado en la zona al centro de dicha zona.
- Media ponderada según ángulo: El programa utilizará la cota inversamente proporcional al ángulo LIDAR registrado en cada punto encontrado en la zona.
- Menor cota encontrada: El programa utilizará la menor cota encontrada entre los puntos que se hallen en la zona.
- Mayor cota encontrada: El programa utilizará la mayor cota encontrada entre los puntos que se hallen en la zona.
Vea también: